



































在過(guo)去的(de)十年(nian)中,數(shu)據中心空(kong)間的(de)速度已從每秒兆急劇提高到每秒千兆。這給數(shu)據中心管理員設計光纖布線拓撲以應對這些更高速度帶來(lai)了挑戰(zhan)。
特別(bie)地,一個挑(tiao)戰是極性,也稱(cheng)為(wei)光路。極性是指(zhi)光纖束在(zai)通道中的位置,以確保(bao)正確接收(shou)傳輸的數(shu)據。
電信行(xing)業協會在名為(wei)ANSI / TIA-568.3-D的(de)文件中(zhong)批準了三種MPO極性方(fang)(fang)法(fa)作為(wei)標準。這三種MPO極性方(fang)(fang)法(fa)的(de)標題分別為(wei)方(fang)(fang)法(fa)A,方(fang)(fang)法(fa)B和(he)方(fang)(fang)法(fa)C。這些方(fang)(fang)法(fa)使用兩(liang)根光纖(xian)從發送到(dao)接收作為雙工和(he)十二根光(guang)纖作為并行連(lian)接來顯示(shi)光(guang)路。
雙工(gong)鏈接
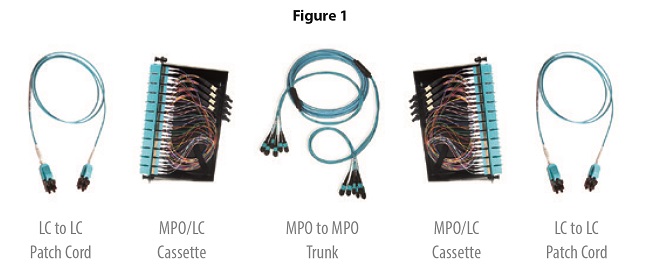
雙(shuang)工鏈接(jie)的(de)兩端各有一條雙(shuang)絞線(xian)(LC到LC)。雙(shuang)工跳(tiao)線(xian)插入鏈路(lu)兩端的(de)MPO / LC盒式模(mo)塊(kuai)中。
卡(ka)式盒模塊之(zhi)間(jian)是MPO到MPO中繼線。MPO連接器具有用于確(que)保配(pei)對(dui)時光纖位置的鑰匙。與連接器配(pei)對(dui)的光纖耦合器可以是向上。圖1顯示了雙工鏈接的示例。
并行鏈接
并行鏈路在鏈路的(de)每一端都有一條并行跳線(xian)(12芯(xin)MPO到MPO)。并行跳線(xian)插入鏈路兩端的(de)光(guang)纖耦合器面板中(zhong),然后插入光學(xue)元件中(zhong)。
并行鏈(lian)接-MPO跳(tiao)線連接
在雙工和并行鏈路中,由于盒式模塊和MPO跳線上的鍵方向向上或向下,LC-LC跳線,MPO-MPO跳線以及光纖耦合器都有極(ji)性選項。因此,混合和匹配這些單獨的(de)組件可能(neng)會給最終用戶(hu)造成混亂和無法(fa)正常工作的(de)連接。了解這三種MPO極(ji)性方法(fa)中(zhong)每種方法(fa)的(de)基本(ben)區別(bie)可以幫助(zhu)確定要部署的(de)方法(fa)。
方法A
方(fang)(fang)法(fa)A是第一個在數據中心布線市場得(de)到認可的方(fang)(fang)法(fa)。方(fang)(fang)法(fa)A易于(yu)安裝,因為所(suo)有光纖均以直極性(xing)運行(xing)。對于(yu)雙(shuang)工和并行(xing)連(lian)接,光纖耦合(he)器均(jun)為(wei)向下。
雙工(gong)的交叉(從發(fa)送到(dao)接(jie)收)是通過鏈路(lu)一(yi)(yi)側(ce)(ce)的A至(zhi)B跳(tiao)線(xian)發(fa)生的。鏈接(jie)的另一(yi)(yi)側(ce)(ce)使用A-to-A跳(tiao)線(xian)作(zuo)為直接(jie)極(ji)性。12芯MPO到(dao)MPO跳(tiao)線(xian)也有(you)相(xiang)同的想(xiang)法。翻(fan)轉(zhuan)(光纖1到(dao)光纖12)校正光路(lu)以進行發(fa)送和接(jie)收。鏈接(jie)的一(yi)(yi)側(ce)(ce)具有(you)翻(fan)轉(zhuan)的MPO跳(tiao)線(xian),而(er)另一(yi)(yi)側(ce)(ce)具有(you)直的MPO跳(tiao)線(xian)。
方法A要求最終(zhong)用(yong)(yong)戶管(guan)理兩個單獨的(de)雙工跳(tiao)線,即A-to-B和(he)A-to-A。對(dui)于并行(xing)鏈路,最終(zhong)用(yong)(yong)戶需要將12芯MPO跳(tiao)線直(zhi)線和(he)倒轉進行(xing)管(guan)理。這些(xie)跳(tiao)線選(xuan)項會導致數據(ju)中(zhong)心出現許多極性問題(ti)。方法A需要存儲(chu)四根不同極性的(de)跳(tiao)線,并了解在(zai)鏈接的(de)哪一(yi)側(ce)使用(yong)(yong)它們(men)。
方法B
當(dang)數據(ju)中心(xin)領域開始支持使(shi)用12或24光纖MPO連接器的光學器件時,方(fang)法B受(shou)到歡(huan)迎。這些光學器件以40GE或100GE的速(su)度運行(xing)。
方法B背后的理念(nian)是,最終用(yong)戶可以輕松地從雙工連接(jie)(ST,SC或(huo)LC)過(guo)渡到(dao)并行連接(jie)(12或(huo)24光(guang)纖(xian)MPO)。數(shu)據中心操作員可以從主干(gan)或(huo)水(shui)平MPO干(gan)線上拔下盒(he)式磁(ci)帶(dai)模塊,然后插入光纖(xian)耦合器(qi)面板。這會將跳線從雙工(gong)切換為并行(xing)。
但是,方(fang)法B的挑戰(zhan)在于,在雙工和(he)并行鏈(lian)路類型中可(ke)以使(shi)用三種不同的光纖耦合(he)器。這(zhe)些是“鍵(jian)向(xiang)(xiang)上鍵(jian)向(xiang)(xiang)下”,“鍵(jian)向(xiang)(xiang)下鍵(jian)向(xiang)(xiang)下”和“鍵(jian)向(xiang)(xiang)上鍵(jian)向(xiang)(xiang)上”。當最終用戶想要將(jiang)單(dan)模(mo)彎角MPO安裝到布線(xian)設備中時,光纖耦(ou)合器類型的(de)這(zhe)種混(hun)合出現了另一個困難。此方案需(xu)要特(te)定的(de)專有產品(pin)。
使用(yong)方(fang)法B,鏈接(jie)中有兩種不同(tong)的盒帶模塊類(lei)型。這就需要儲備兩個(ge)不同(tong)的盒式磁帶模塊零件(jian)號,這可(ke)能(neng)是(shi)另一個(ge)挑戰。但是(shi),雙工或(huo)并行(xing)跳線在鏈路的每(mei)一側都是(shi)相同(tong)的,這是(shi)對方(fang)法A的改進(jin)。
連(lian)接(jie)較新(xin)的(de)12芯和24芯MPO光(guang)學(xue)器(qi)件的(de)能力也是一(yi)個(ge)好(hao)處。隨著數(shu)據(ju)中(zhong)心(xin)的(de)速度(du)從40GE上升到(dao)400GE,這些并行光(guang)學(xue)器(qi)件將在數(shu)據(ju)中(zhong)心(xin)空間中(zhong)變得越來越普(pu)遍。
方(fang)法(fa)C
方法C是針對雙工(gong)(gong)連(lian)(lian)接(jie)的(de)方法A的(de)修改(gai)。此方法與運行使(shi)用(yong)(yong)雙工(gong)(gong)SC和LC連(lian)(lian)接(jie)器的(de)8GFC,16GFC和32GFC光纖通(tong)道的(de)存儲(chu)應(ying)用(yong)(yong)程序很(hen)好地(di)配合使(shi)用(yong)(yong)。它還可以(yi)與以(yi)太網的(de)雙工(gong)(gong)連(lian)(lian)接(jie)一起(qi)很(hen)好地(di)工(gong)(gong)作(zuo),該(gai)雙向連(lian)(lian)接(jie)可以(yi)支持高(gao)達40GE的(de)速度,以(yi)與雙向光學器件(jian)一起(qi)使(shi)用(yong)(yong)。
此方法的好處是,它(ta)允許(xu)在(zai)鏈接的兩端使(shi)用標準的A至(zhi)B跳線。所有光纖耦(ou)合器都是向上。發送(song)接收的(de)交叉發生在MPO中(zhong)繼(ji)中(zhong)。鏈接中(zhong)的(de)兩個側(ce)面紙盒模(mo)(mo)塊與筆直極(ji)性相同。這種方法的(de)缺(que)點(dian)是,從雙工(gong)鏈路轉換(huan)為并(bing)行鏈路需要昂(ang)貴的(de)轉換(huan)模(mo)(mo)塊來代替(ti)盒式磁(ci)帶模(mo)(mo)塊。
方法A,B和(he)C的局(ju)限性
這三種標(biao)準方法(fa)都可以有(you)效地支持雙(shuang)工鏈(lian)接(jie),但是每種方法(fa)都有(you)一些局限性。
方(fang)法A使用直通模塊和(he)中繼線(xian),但(dan)是它需(xu)要兩(liang)種(zhong)不同類型的(de)接插線(xian)。如果(guo)使用兩(liang)條相(xiang)同極性的(de)跳線(xian),則鏈接將(jiang)無法正常工(gong)作。方(fang)法B需(xu)要兩(liang)種(zhong)不同的(de)光(guang)纖耦合器組合,在某些情況下可能會很麻煩。這兩個光纖耦合器組(zu)合會在鏈接(jie)的(de)(de)每(mei)一端產生兩個不同的(de)(de)盒式磁帶(dai)模塊。同樣,使(shi)用成角度(du)的(de)(de)單模MPO連接(jie)器對于(yu)確(que)保成角度(du)的(de)(de)MPO套圈(quan)正確(que)對準匹配也可能具(ju)有挑戰性。
雖然方法A和(he)B可(ke)以支持(chi)并行鏈接,但是(shi)方法C通常使用轉換模塊,這可(ke)能會增加鏈接的成本。轉換模塊不是(shi)基于標(biao)準的產品。
此外,沒有(you)一(yi)種方法(fa)(fa)可(ke)以(yi)正(zheng)確解決運行200GE和400GE的(de)(de)(de)下一(yi)代光(guang)學器件的(de)(de)(de)問題。這些速度將在平行光(guang)學系統上(shang)(shang)以(yi)100米的(de)(de)(de)多(duo)模玻(bo)璃(li)上(shang)(shang)的(de)(de)(de)24根光(guang)纖和在500米的(de)(de)(de)單模玻(bo)璃(li)上(shang)(shang)的(de)(de)(de)12根光(guang)纖上(shang)(shang)的(de)(de)(de)速度運行。每種方法(fa)(fa)都有(you)其獨特的(de)(de)(de)優(you)點和挑(tiao)戰。